大会概要
名称:関東春ロボコン2025
日付:2025年3月20日~21日
会場:BumB東京スポーツ文化館メインアリーナ
今年は総勢17校、合計21チームが参加しました。早稲田大学ROBOSTEPからは24年度に入ったメンバー17名が、「大熊重信」と「ずっと最速でいいのに。」の2チームに分かれて出場しました。
競技内容
今年のテーマは”クマさんの蜂蜜狂宴(ハニーパーティ)”でした。「ハチミツ」と呼ばれる黒板消し、「ハチの巣」と呼ばれるボール、「カップ」と呼ばれる塩ビ管、「タルオブジェクト」と呼ばれるペール缶が今回のオブジェクトです。
「カップ」の上に置かれた「ハチミツ」と、「ハチの巣」を「ハチミツゾーン」と「ハチの巣ゾーン」から「タルゾーン」へ移動させる個数と時間を競います。最速を目指して「ハチミツ」と「ハチの巣」を直接投擲するのか、安定性を求めてそれぞれを持って運ぶのかが注目ポイントでした!
オブジェクト一覧
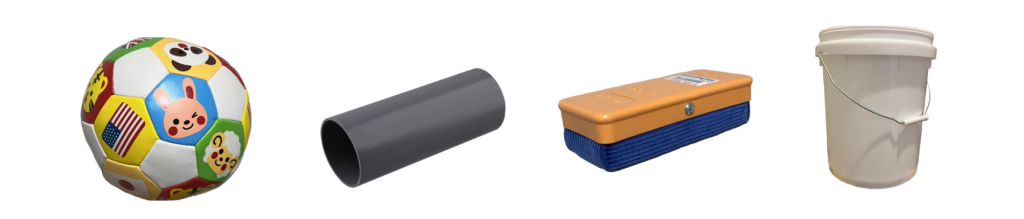
(画像左から「ハチの巣」、「カップ」、「ハチミツ」、「タルオブジェクト」)
(写真はモノタロウ公式サイトより引用)
フィールド全体図

等角投影図

平面図

(図はKantouHaruRobocon_2025_Field_3.00より引用)
大会結果
早稲田大学はビデオ審査の結果により、2チームともにシード権を獲得することができました!
予選の対戦表は以下の通りです。

予選
大熊重信
「ハチミツ」と「ハチの巣」を着実に運ぶことで2試合ともVゴールを達成し、勝利しました。最速タイムは1:23でした。
ずっと最速でいいのに。
こちらも同様にそれぞれのオブジェクトを着実に運ぶことで2試合ともVゴールを達成し、勝利しました。試合の途中で違反をしてしまい強制リトライとなる場面もありましたが、落ち着いて対処しました。最速タイムは1:49でした。
以上の結果により「大熊重信」は予選6位、「ずっと最速でいいのに。」は予選7位で決勝トーナメントに進むことができました。
決勝トーナメント表は以下のようになりました。

(表は KantouHaruRobocon_2025_オリエンテーション資料より引用)
決勝トーナメント
大熊重信
準々決勝では科学技術研究部(新潟大学)と対戦しました。足回りの4輪のうち1輪が正常に作動せず、リトライをしている間に相手にVゴールをされてしまい、敗退しました。
ずっと最速でいいのに。
準々決勝ではヴォイテック隊長(東京高専)と対戦しました。こちらも足回りの4輪のうち1輪が正常に作動せず、リトライをしている間に相手にVゴールをされてしまい敗退しました。
最終的な結果としては両チームともにベスト8となりました。
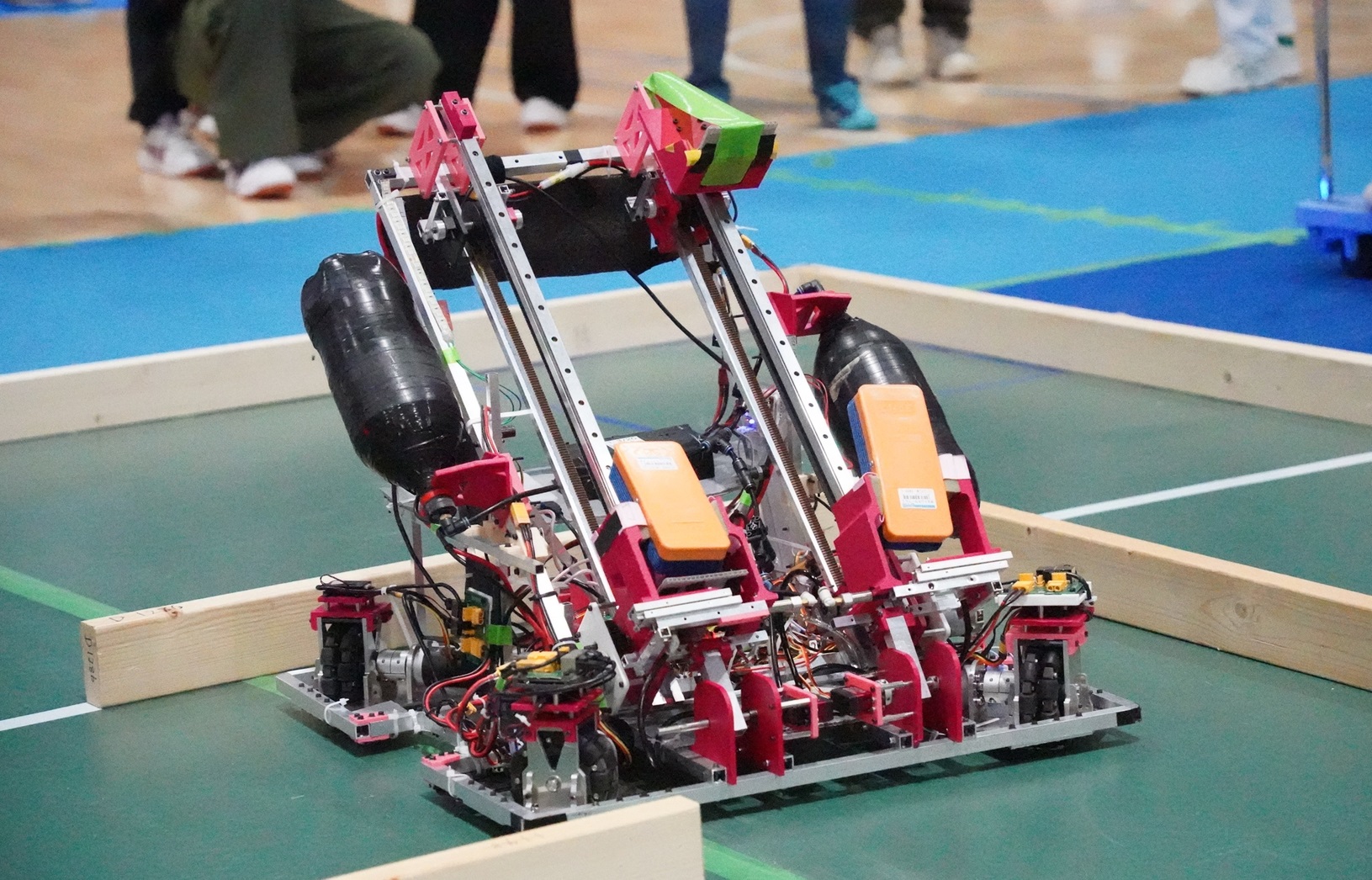
ロボットの説明
出場したロボットの紹介を行います。
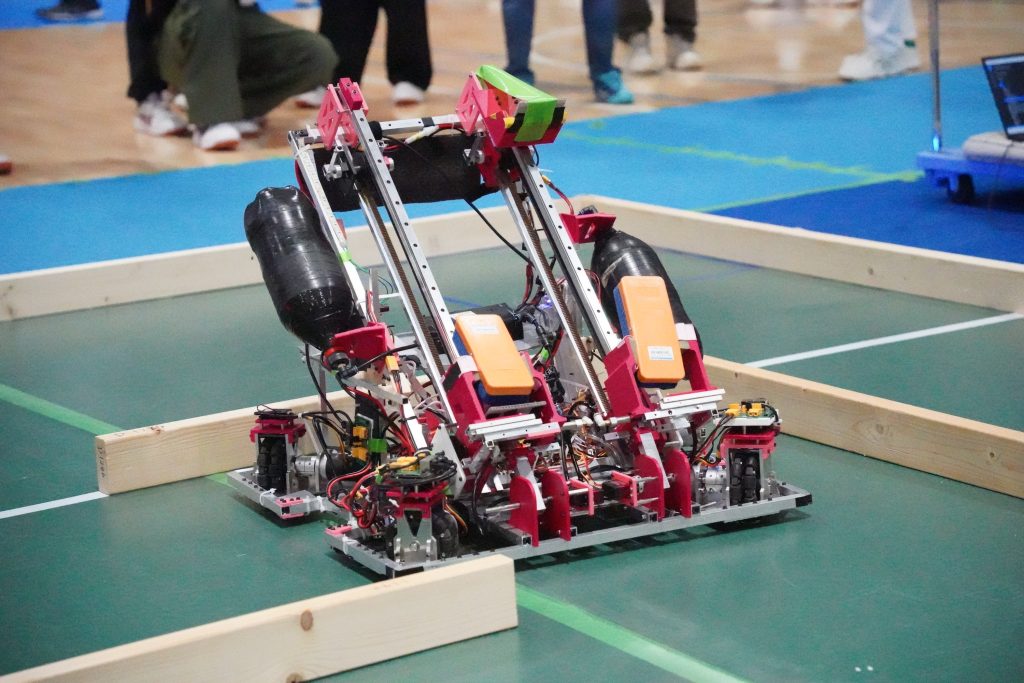
大熊重信
チーム「大熊重信」のロボットは回収、装填、投擲の3つの機構を搭載し、足回りには4輪独立ステアリング機構を搭載しました。

回収機構では共通のハンドで「ハチミツ」と「ハチの巣」をいずれも把持できるような形を模索し、試作を重ねました。装填機構ではハンドにより回収された「ハチミツ」を1つずつ押し出し、投擲機構に送ることができます。投擲機構では「ハチミツ」を左右からローラーで挟むことでゴールの「タルゾーン」まで飛ばすことが可能でした。
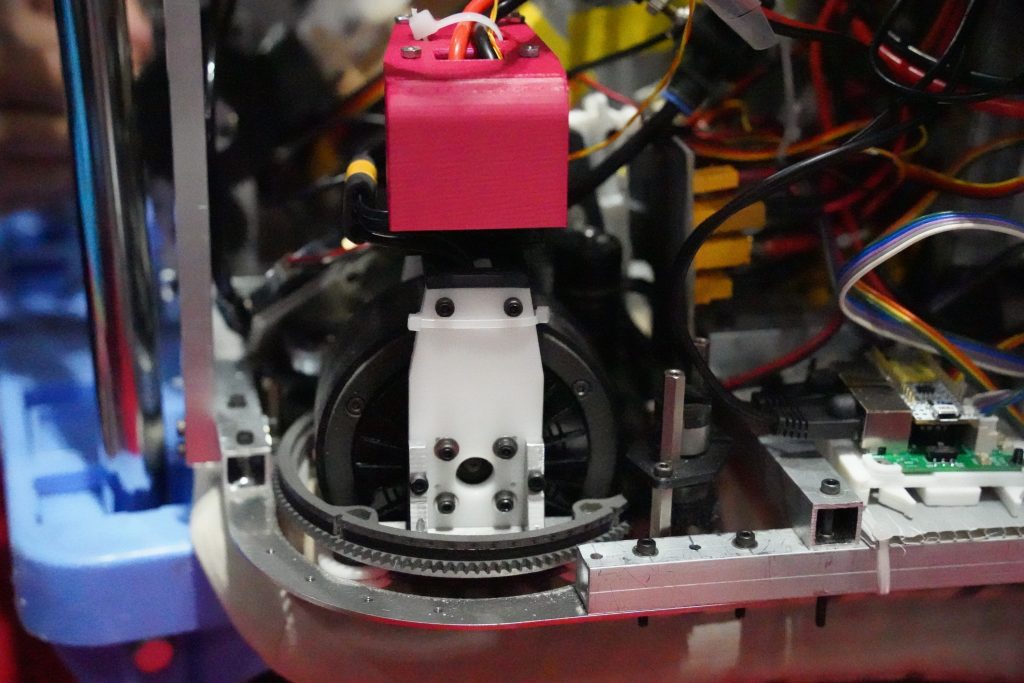
さらに、足回りの独立ステアリング機構は素早い加速と方向転換を可能とする機構で、シュッという音と共に移動する様はチーム「大熊重信」のロボットの大きな特徴です。本番では「ハチミツ」の投擲の成功を担保できなかったため、この車輪を生かして「雑木林ゾーン」を移動することで「ハチミツ」と「ハチの巣」をゴールの「タルゾーン」まで運びました。
足回りの操縦は、手動で行いましたが、機構の操縦はROSを用いて自動で行いました。
ずっと最速でいいのに。
チーム「ずっと最速でいいのに。」は速さを目標にベルト式直動射出機構(以下ベル直)の開発に取り組みました。ベル直では、ベルトを高速回転させ加速台に乗ったオブジェクトを射出します。精度の高い投擲を実現する機構なので、近年多くの大学のロボットで採用されています。

装填と回収を行うアームは2023年のNHK学生ロボコンで採用されていた、エアシリンダによる把持を行う機構を改良して搭載することにしました。
「ハチミツ」と「ハチの巣」の両方を飛ばせるように皿と回収、装填のアームを製作することに苦戦しました。
肝心のベル直ですが、当日はベルトが切れてしまうなど耐久面での調整が間に合いませんでした。結果、オブジェクトをハンドで持ち上げ、「雑木林ゾーン」を二往復することとなりました。
まとめ
今回は1年生にとって2回目の外部の大会となりました。前回大会よりも自分たちでしっかりとマネジメントを行うことができ、ロボットを完成させることができました。しかし、満足のいく機体とは程遠いものでした。今回の反省を活かして、次の外部の大会となるNHK学生ロボコンでより良い結果が出せるように、技術力の向上を目指して、開発に取り組んでいきたいと思います。