2025年6月8日、早稲田大学ROBOSTEPの3年生のメンバーが、大田区総合体育館で開催されたNHK学生ロボコン2025に参加しました。
NHK学生ロボコン2025のライブ配信アーカイブ
ルール概要
今年度のNHK学生ロボコンの競技テーマは「ROBOT BASKETBALL」です。8m×15mの平坦なフィールドで2対2のバスケットボールの試合を行います。ボールは通常のバスケットボールの試合でも用いられる約600gの7号球を用います。両ロボットのサイズ制限は直径80cm、高さ1.5m(試合中2.4m)と例年よりも背の高い機体となりました。
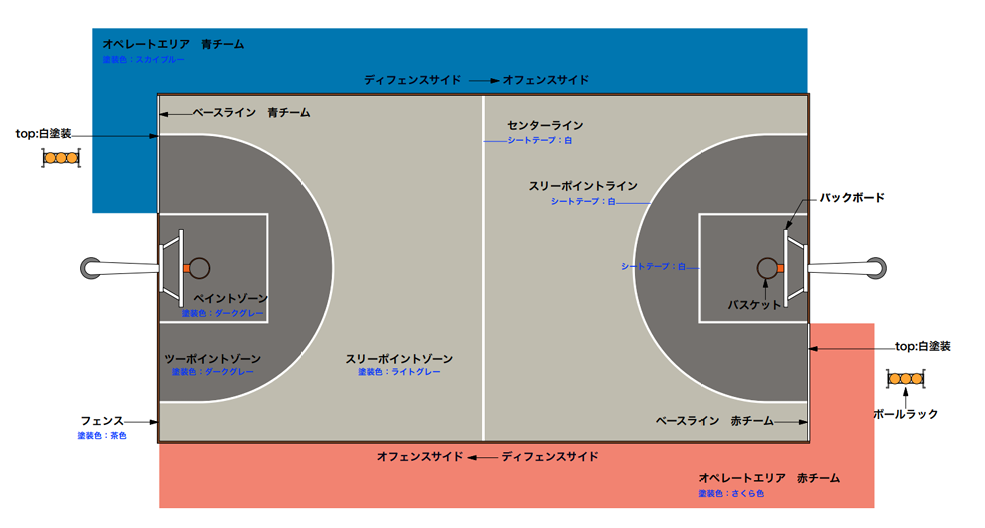
シュートを打つ場合は、ボールを持っていない味方機体にパスをするか、センターライン上でドリブルをして、ゴールまで進む必要があります。さらに、パスを受けたロボットはその場で足回りを動かさずにシュートするか、ドリブルしてからシュートする必要があります。シュートには3種類あります。
- 3ポイントシュート:3ポイントゾーンからのシュートで、成功すると3点
- 2ポイントシュート:2ポイントゾーンからのシュートで、成功すると2点
- ダンクシュート:ペイントゾーンからジャンプしてボールを下向きのベクトルにリリースするシュートで、成功すると7点
オフェンス側になったチームは20秒以内にシュートまたはダンクを行う必要があります。シュート・ダンクを行うか20秒が経過すると攻守交替となります。
また、ディフェンス側がファウルを行った場合、ファウルが行われた場所に応じてオフェンス側に点数が入ります。
2024年では約300gのボールの投擲でしたが、2025年では約600gのボールの投擲ということもあり、例年に比べて重いオブジェクトを遠くに精確に投擲する技術が求められました。バスケットボールをモチーフにした競技のため、相手のロボットとの接触や転倒など、激しい動きや戦略的な攻防が見られるのが特徴です。 詳しいルールはルールブックをご参照ください。
https://official-robocon.com/robocon_wp/wordpress/wp-content/uploads/2025/05/NHK%E5%AD%A6%E7%94%9F%E3%83%AD%E3%83%9C%E3%82%B3%E3%83%B32025_%E3%83%AB%E3%83%BC%E3%83%AB_0516%E4%BF%AE%E6%AD%A3%E7%89%88.pdf
試合結果
本番フィールドの地面は練習場所に比べて反発係数が低く、ボールが回収可能な高さまで跳ねなかったため、ドリブルをすることはできませんでした。しかし、R1投擲はいつも通りのパフォーマンスを発揮することができたため、本番でも高いシュート成功率を達成しました。
第1試合では東京工科大学の「プロジェクトR 」と対戦し3ポイントシュートを2回決めました。相手のファウル1回によってルール上3点が加算され、合計9点を獲得し、9:0で勝利しました。
第2試合では豊橋技術科学大学の「とよはし☆ロボコンズ」と対戦し、相手のスリーポイント2回と味方のファウル1回によって0:9で敗北しました。3ポイントシュート成功数によりワイルドカード2位に選出され決勝トーナメントに出場しました。
決勝トーナメントでは豊橋技術科学大学の「とよはし☆ロボコンズ」と対戦し、相手のスリーポイント1回と味方のファウル2回によって0:8で敗北しました。
結果としてベスト8に進出することができ、さらに本大会において特別賞を受賞しました。
作成したロボットについて
R1とR2で異なる機能を持つロボットを作成しました。
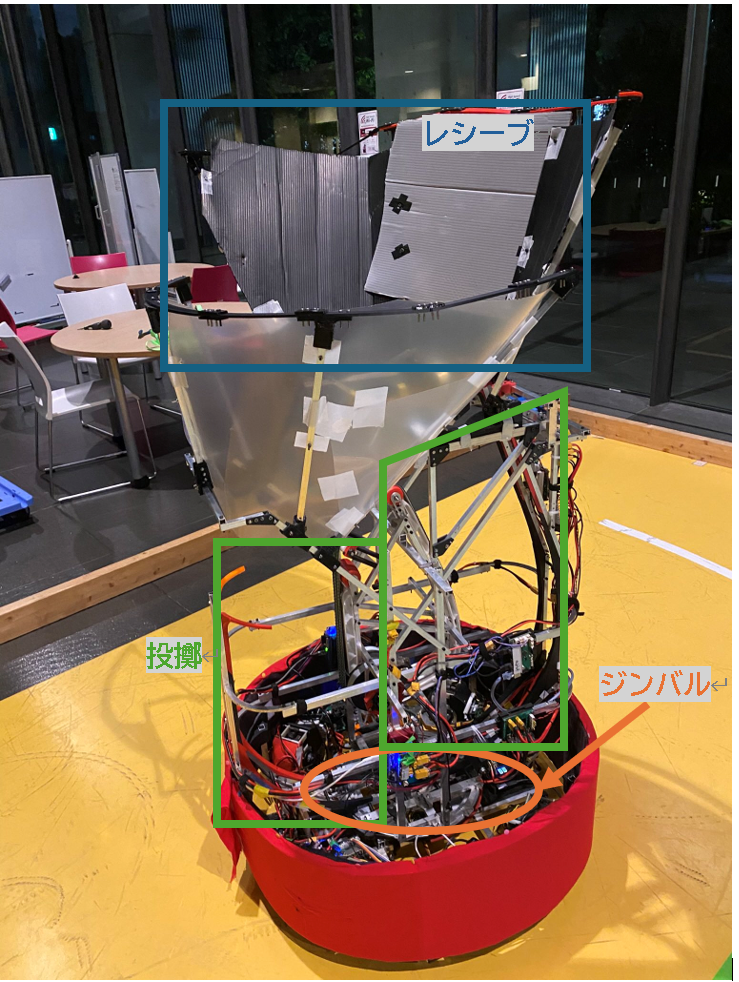

R1はパスの受取とシュートが可能な機体です。R2からのパスを受け取ったあと、ジンバルによって投擲機構を旋回させることでその場から動かずにシュートすることが可能です。特徴的なしずく形軌道の投擲機構によって機体後方から投擲することができるため、妨害されにくくなっています。
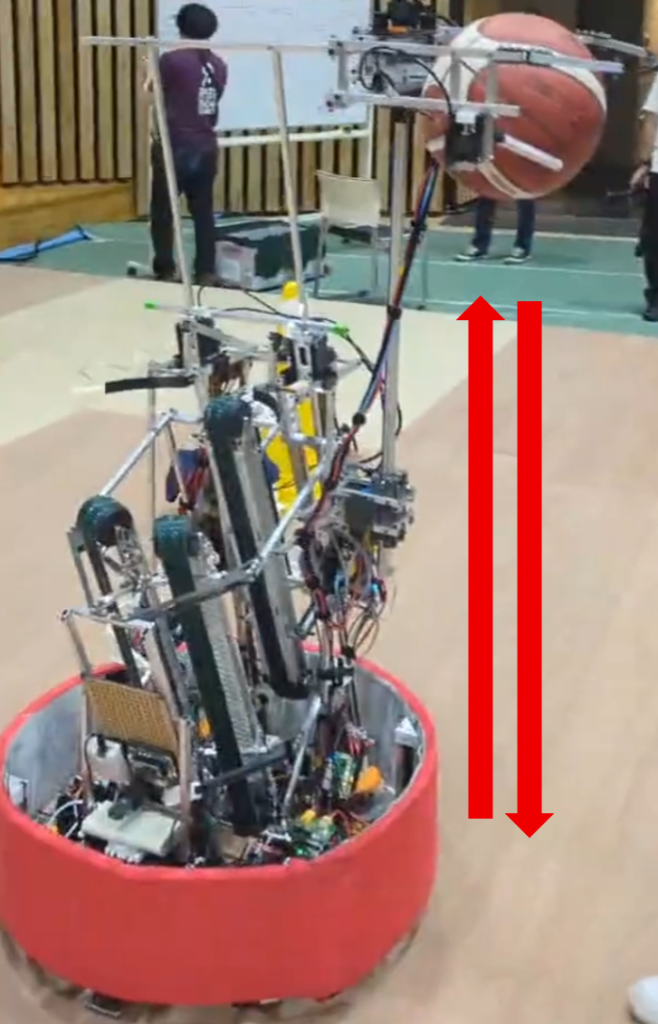
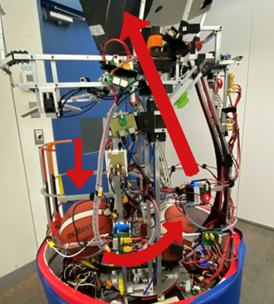
R2はパスとドリブル、シュートが可能な機体です。エアシリンダを動力とするリンク機構によって動く爪と回転するハンド、昇降機構によってドリブルを高所から自由落下させたあと、低所でキャッチします。シンプルな3ベルト投擲によって精度高くパス、シュートすることが可能です。また、R2には展開可能な妨害機構がついているため、相手機体の正面に立つことでシュートを阻むことができます。さらに、R2には四輪独立ステアリングを搭載しています。4つの車輪それぞれを独立して操舵できるため、走行用モーターの出力をすべて推進力にすることができます。これによってオムニホイールよりも高速・高加速度な全方向移動を実現し、相手との高度な駆け引きを可能にしました。
R1、R2ともに投擲機構にブラシレスモーターを採用することで大きな出力で投擲することができました。
昨年と同じく、それぞれの機体に前と後ろに1台ずつ「LiDAR(ライダー)」と呼ばれる2次元の距離センサーを取り付けました。
このLiDARからの情報と、車輪の回転から得られる位置のデータ(ホイールオドメトリ)を組み合わせ、より正確にロボットの現在位置を知ることができるようにしています。自己位置推定の結果から自機体からのゴールの方向と距離を推定し、自動的にゴールの方向へ向きさらにゴールとの距離から適切な投擲速度を計算することで操縦者がボタンを1つ押すだけでいつでも精確なシュートを行えるようにしました。ロボット同士で自己位置を送り合うことでパスの自動計算も行いました。
足回りの操縦や投擲のタイミングは人間が操作し、投擲方向や投擲速度は自動で計算や制御することで人間の柔軟性と自動制御による正確さを両立しました。
最後に
ご支援していただいた企業の皆様、寄付をしてくださった皆様、ご協力いただいた関係者の皆様、応援してくださった皆様誠にありがとうございました。
おかげさまでNHK学生ロボコン2025では昨年に引き続き2年連続のベスト8を達成し、さらにR1の特徴的な投擲機構が評価され、5年ぶりに特別賞をいただくことができました。
これからも昨年度までから引き続きサークルとして持続的な発展のための地盤づくりを更に進め、培った技術やノウハウを次世代へと引き継ぎ、優勝を目指して活動を続けてまいります。
今後ともご支援やご協力、応援のほどよろしくお願いいたします。
寄付・スポンサー制度について
早稲田大学ROBOSTEPは、企業様や個人の皆様からの温かいご支援によって活動を続けることができています。
私たちの活動にご賛同いただき、ご支援いただける企業様を募集しております。物品支援とご寄付のどちらも募集しております。ご支援いただいた相当額に応じて、ROBOSTEPの活動報告や、企業様のロゴを掲載するなどの様々なリターンをご用意しております。
個人様からの寄付も少額から対応しております。
ご寄付いただいたご支援は、ロボットの製作費、大会参加費など、ROBOSTEPの活動全般に大切に使わせていただきます。
ご興味をお持ちいただけましたら、ぜひこちらのページ(https://robostep.sakura.ne.jp/blog/?page_id=749) より詳細をご確認いただけると幸いです。ご検討のほど、よろしくお願いいたします。