早稲田大学ROBOSTEPからは、一年生25名が「pâtissier」「料理の鉄人」「パンケーキマフィア 」の3チームとして参加しました!
全チーム予選リーグを勝ち抜き、それぞれ
pâtissier : 3位
料理の鉄人 : 4位、技術賞
パンケーキマフィア : ベスト8
という結果を得ることが出来ました!
F³RC2024のルール

手動機(以下R1と呼びます)と自動機(以下R2と呼びます)のロボット2機体を使って、パンケーキに見立てた鍋敷き3つとチョコレートに見立てた小さなハート5つ、パイナップルに見立てた黄色いテープ5つを「お皿」に盛り付けます!
「パンケーキ」
「チョコレート」

「お皿」

フィールドは2つに分けられていて、R1はそのうち1つのエリアにしか入れません。R1の入れるエリアには「パンケーキ」と、「チョコレート」「パイナップル」を合わせた「トッピング」を最大1種類置くことができます。よって、今回早稲田大学ROBOSTEPではR1に「パンケーキ」の回収、R2に「トッピング」2種類の回収を任せました。
3分以内に、お皿に「パンケーキ」と「トッピング」を全て盛り付けられたら、勝利確定条件であるVゴール「Bon Appétit!」が達成できます。
出場チームと機体の紹介
大会に参加したのは以下の3チームです!
pâtissier
とんとんとん!最速18秒でVゴール!
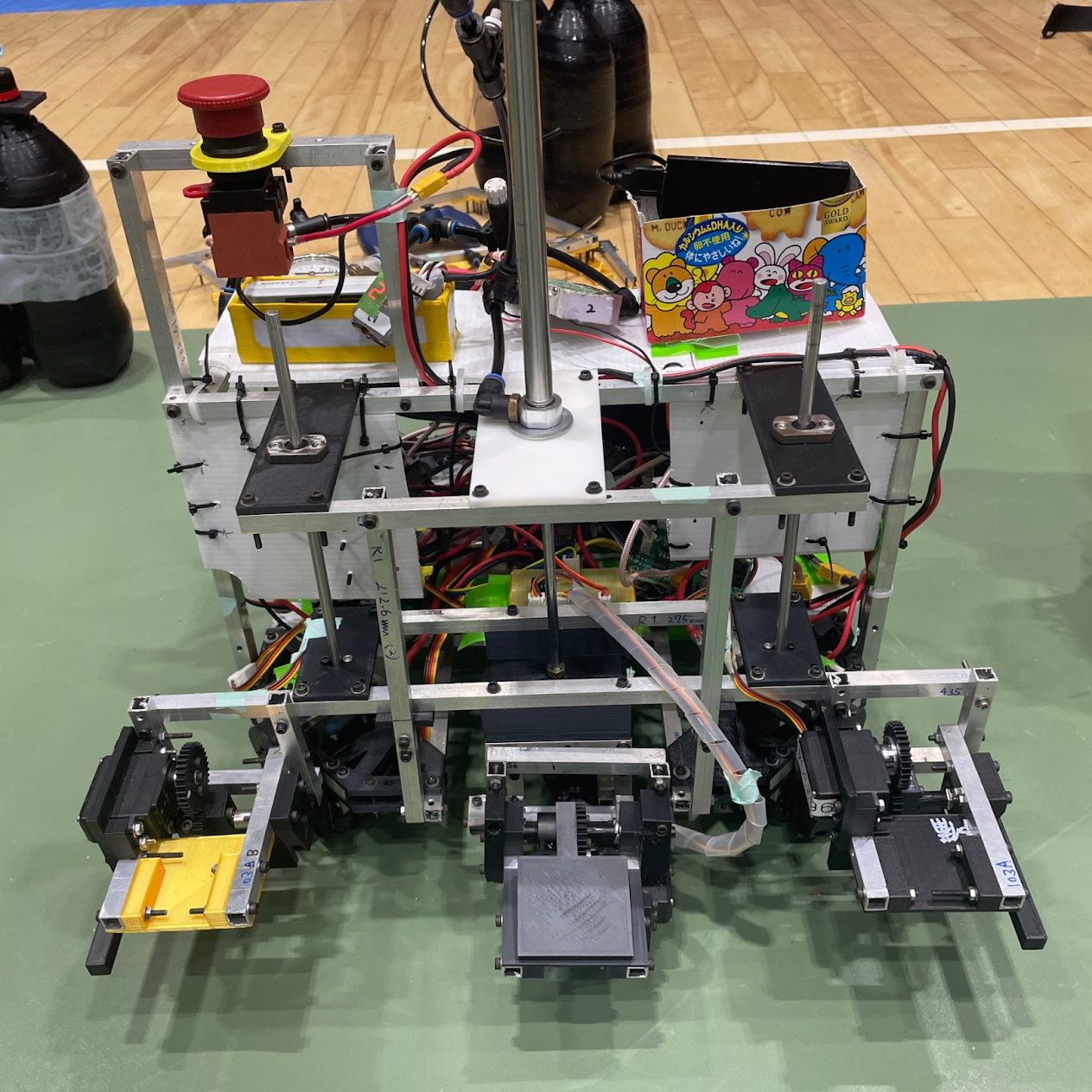
R1は「パンケーキ」を3枚同時に掴み、真ん中のものだけひっくり返す仕様です。大きさの関係上、真ん中の回転アームが足回りの内側に入っており、アームの横幅を減らすためにギアを縦に積んでいます。 両脇のアームには壁当ての部品があります。「パンケーキ」、アーム、台がぶつからないようにアームの高さ調整や3Dプリント部品の厚さを試行錯誤しました。
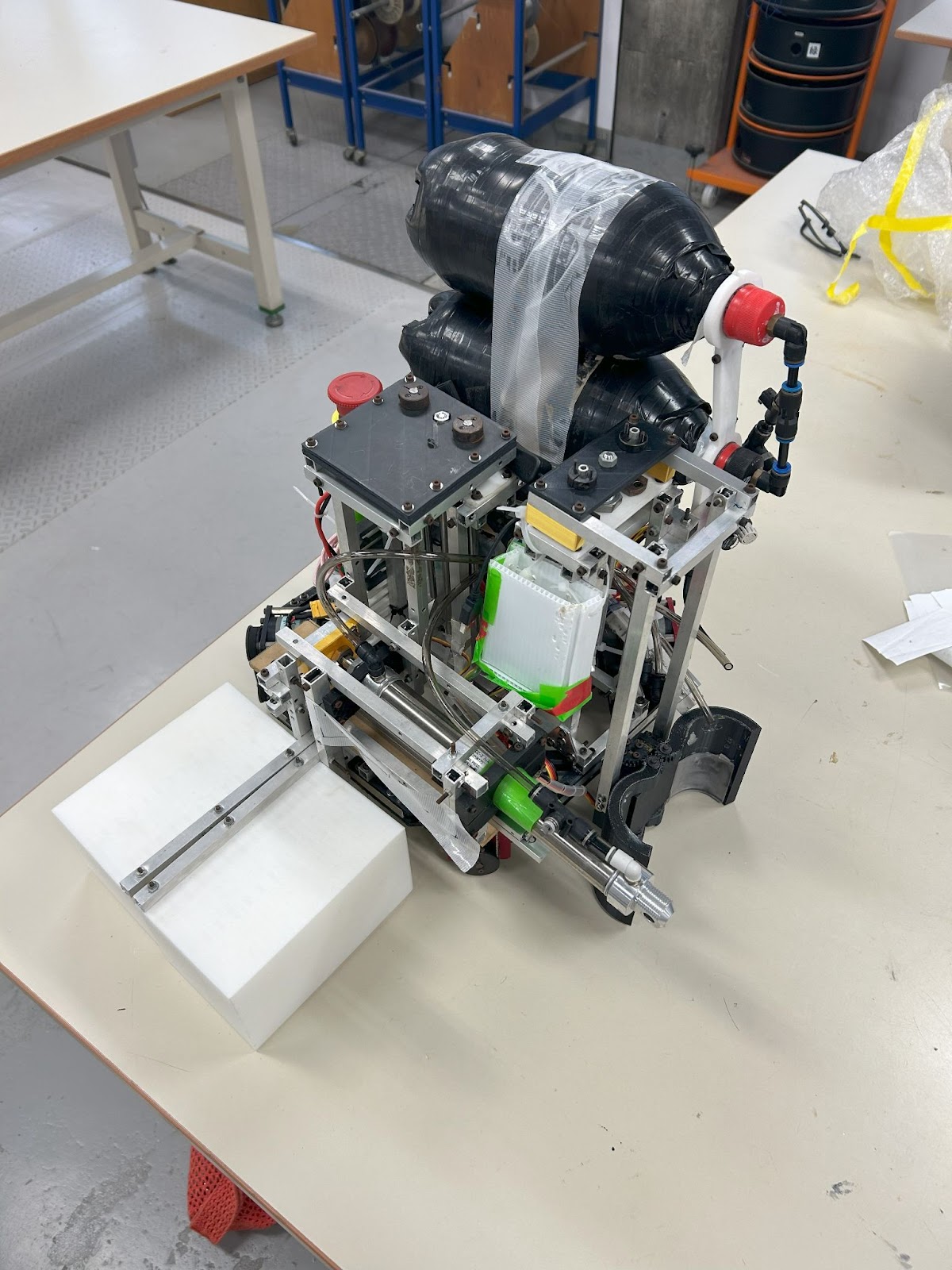
こちらがR2です。R2は自動機となっていて、R1とは違いコントローラから操縦することは出来ず、事前に書き込んだプログラムで動かします。
「チョコレート」を写真左側の箱形のハンドで一気につかみ、「パイナップル」を写真右側のハンドでつかんで持ち上げ、皿に入れます。
全自動なので、フィールドや機体の初期位置などのちょっとした条件の違いが誤差を生みます。練習の段階では順調に動いていましたが、本番のフィールドでは思った通りに動いてくれず、勝利を逃してしまうことがありました。自動機の停止位置の正確性が今後の課題であることが浮き彫りになりました。
料理の鉄人
くるりんパッ!
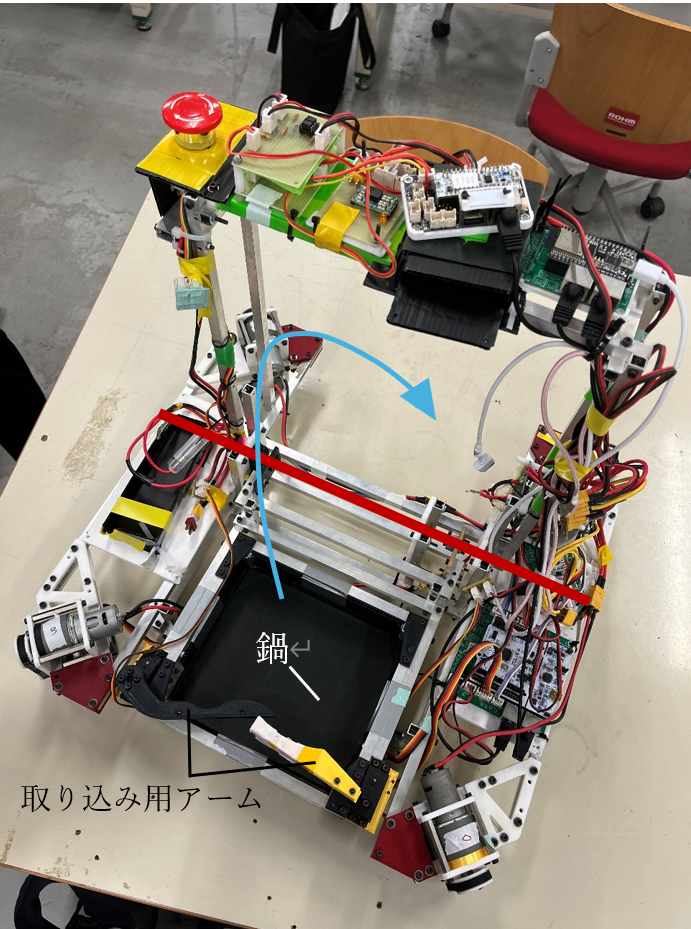
R1(手動機)は台の上から「パンケーキ」をとり、フィールド上にある「お皿」へと運びます。
写真中赤線部分を中心として青矢印のように鍋を180度回転させることで3枚の「パンケーキ」を一気にひっくり返しながら皿の中に入れます。
鍋を回すサーボモーターは初めトルク不足で回らず、高トルクのサーボを買うことになりました。トルク計算の重要性を実感した瞬間です。また、取り込み用アームを支えるプリントパーツは試運転中に何度も折れ、厚さや充填度を調節する中で実際の3Dプリント部品の強度についても学ぶことができました。
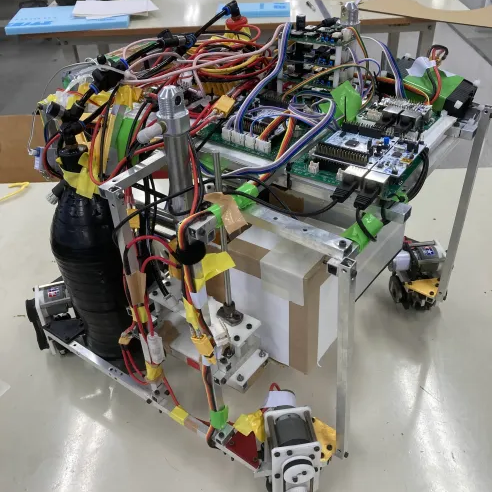
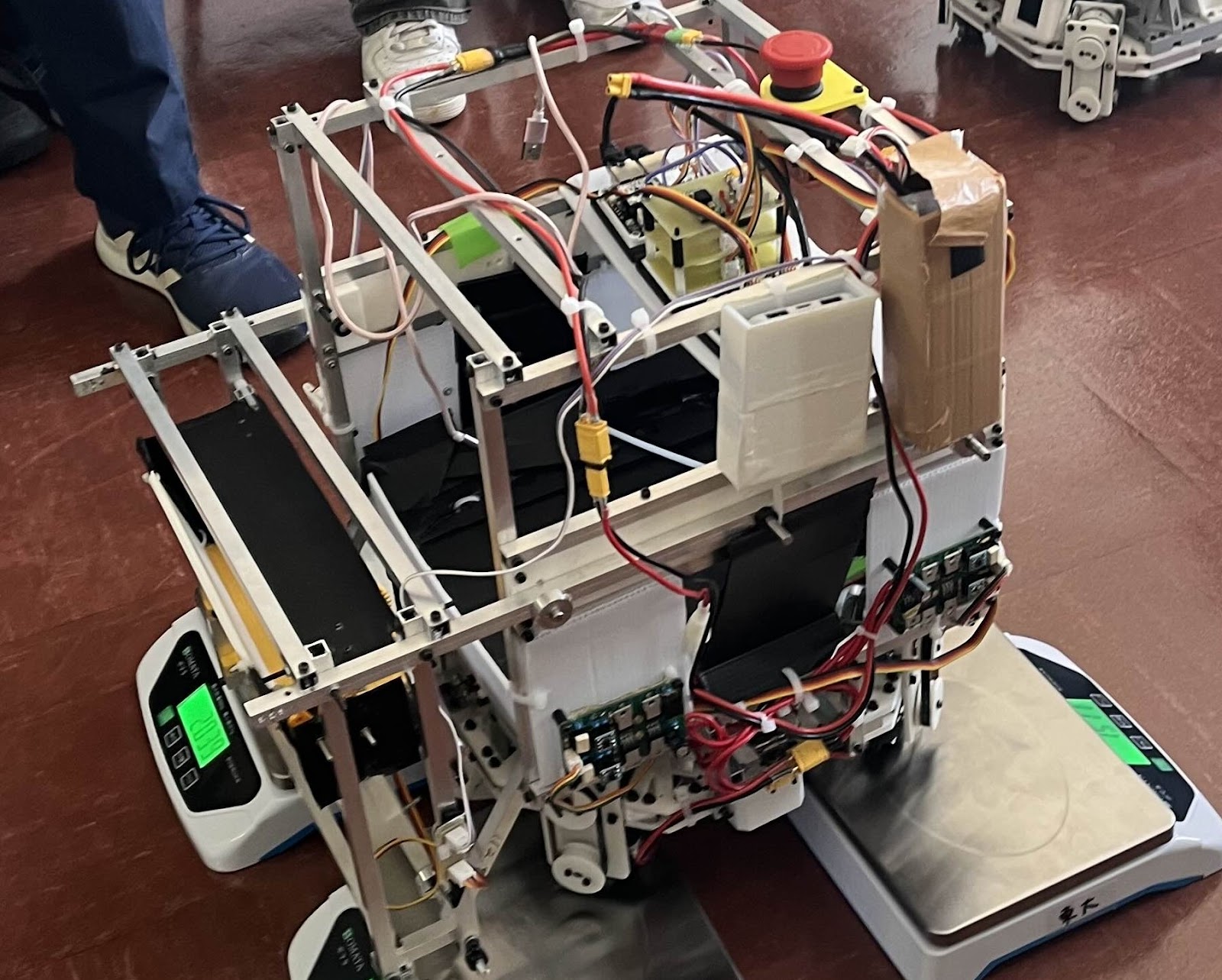
地面に水平方向と鉛直方向に取り付けられたエアシリンダーによって2つの箱をそれぞれ動かして「チョコレート」と「パイナップル」を回収します。機体を最初にくみ上げた時は、全体的にグラグラして安定していませんでした。改良を重ねた結果機体が完成したのがテストランの日となってしまいました。電装の頑張りによって何とか自動でトッピングの回収と盛り付けができました。
パンケーキマフィア

掴んで背負い投げ!
1枚ずつ掴んで背中に3枚溜め込んで一気に解放!必要な機構だけを詰め込んでかなりコンパクトサイズにしました。とてもかわいいです。時間がなかったことによりほぼすべてのパーツが3Dプリント部品になってしまいました。先輩のフィラメントをたくさん使いました。長時間プリントしてくださった先輩と3Dプリンタに感謝。
1号機

2号機
『トッピング』を壁に押し付け掬いあげ、そのまま機体に内部に取り込むことによって回収します。実はこのR2は2代目で、1代目が存在します。8月末に完成したんですが、上手く『トッピング』回収できないことから、なんと完成してからの却下になりました。それでも設計はめげずに頑張って2代目を作り上げました。当時は白目を向いて徹夜しながら夜な夜な3DCADで図面を作成していました。
「Bon Appétit!」は達成できませんでしたが、みんな最後まで諦めず頑張ってくれました。本当にありがとうございました。
反省・感想
pâtissier
応援ありがとうございました!3位という結果はチームメンバー、そしてなにより先輩方のおかげです。仲間と共にロボコンに捧げたこの夏を、忘れることはないでしょう。F³RCは前哨戦です。この結果に満足せず、次大会では優勝を目指し技術向上に努めてまいります。
料理の鉄人
「Bon Appétit!」を達成することができて嬉しかったです。大会直前の突貫工事に協力し合ったメンバー、急な質問にも快く応じてくださった先輩方、チームの誰が欠けても達成できなかった「Bon Appétit!」だと思います。春ロボでは早い段階から練習を積めるよう、柔軟なマネジメントで安定性の高い機体を実現したいです。
パンケーキマフィア
試合での敗北要因は試合前の最終調整段階で、それまで試していなかった壁あてに挑戦しようとしてしまったことだと思います。最終調整がかなり時間的に押してしまい最終的に「Bon Appétit!」のタイムでせり負けてしまいました。また、開発段階における敗北要因として、アイデアから設計に反映させるときに班内で齟齬をきたしてしまい機体がアイデア通りに完成しなかった点や、最終的な機体の完成が遅くなり、自動化用の調整ができなかった点があります。
全体
先輩の力も借りながら、すべての班がなんとか2機体を完成させることができ、予選突破をすることができてよかったです。反省点も多々あったので、それを生かして関東春ロボコンに生かしたいと思います。
関東春ロボコンでは2班出場する予定ですが、両班が決勝で対戦できるように頑張ります。