2024年の関東春ロボコンのご報告です!
ROBOSTEPの1年生が2023年3月15日に行われた関東春ロボコンに参加しました!2023年の9月に行われた大会に引き続き,2回目の大会となりました.Youtubeに大会のアーカイブがありますので,興味がある方は是非こちらをチェック!!
ROBOSTEPから出場したチームは「HINASTEP」「ロボの節句」の2チームです!
大学の授業との兼ね合いでなかなか思うように活動時間が確保できない中,周りの方々に支えられ,ロボットの完成をさせることができました!
プリント部品をご支援していただいたFormlabs株式会社様、電磁弁や継ぎ手などを提供していただいたSMC株式会社様には深く感謝いたします。
それでは、大会の概要から紹介いたします!
大会概要
名称:関東春ロボコン
日付:2024年3月15日
会場:高尾の森わくわくビレッジ
今年は総勢14校、合計22チームが参加しました。ROBOSTEPからは23年度に入ったメンバーから15名が、2チームに分かれ出場しました。
競技内容
今年のテーマは「雛祭り」。「台座」と「雛人形」と呼ばれるオブジェクトを指定の位置まで運び、特定の置き方をすることによって獲得できる得点を競いました。
本大会では自動機と手動機によってオブジェクトを事前に配置できる場所が異なり、それぞれの場合で違った戦略が求められています!
競技フィールドは以下の通りです。
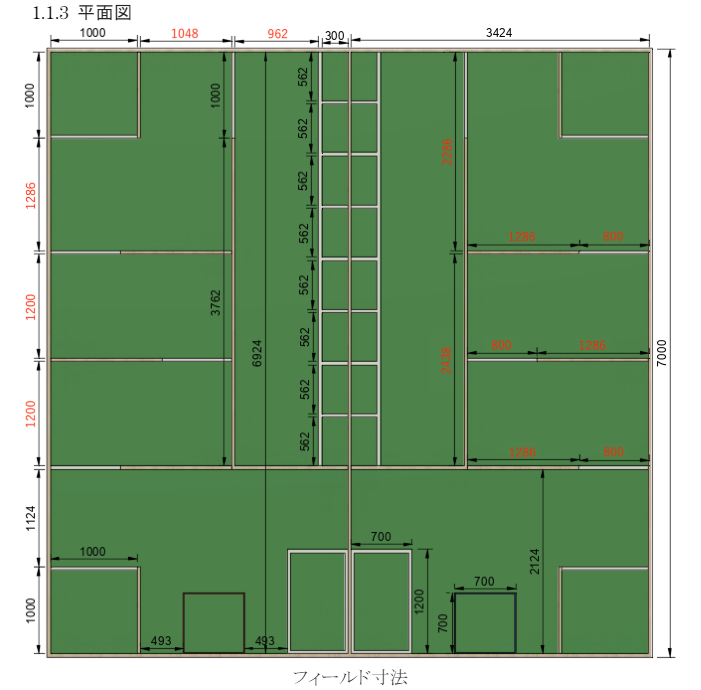
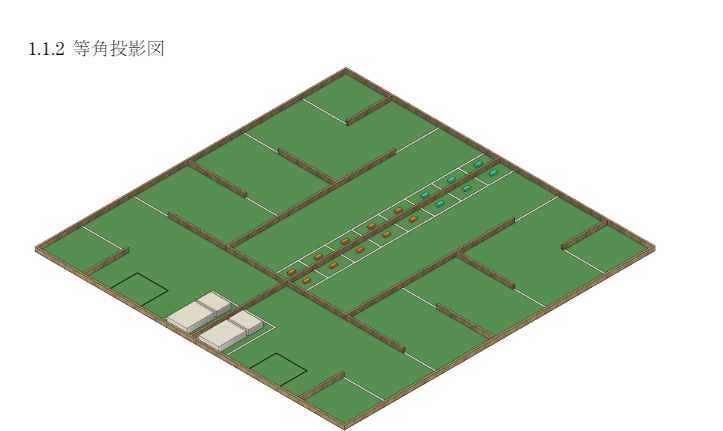
関東春ロボコン2024FIELD&OBJECT(2023年10月20日)より引用
(最終閲覧日:2024年3月27日
https://kantouharurobo.com/haru/2024/KantouHaruRobocon_2024_Field_2.00.pdf)
大会結果
今回の大会の予選は、2~3チームで構成される8つのブロック内での総当たり戦でした!
実際の試合の組み合わせは以下の通りになります!

関東春ロボコン運営委員会公式Xより引用
(https://twitter.com/kantouharurobo/status/1768441763998703991)
それでは各チームの試合結果を紹介いたします!
ロボの節句
【1戦目】
ロボの節句VS桃の絶句
5-215(雛祭り達成)
https://twitter.com/kantouharurobo/status/1768467250758209639/photo/2
初戦にてロボの節句は自動機が想定通りの動きを達成できず、残念ながら台座完成までいけず、反省の多い試合となりました。
【2戦目】
ロボの節句 VS 常盤の森
65-5
https://twitter.com/kantouharurobo/status/1768499631691035125/photo/1
二回戦にてロボの節句は台座完成を達成できました! 試合終了8秒前ほどで何とか台座を完成させ、もぎ取った一勝です。
HINASTEP
【1戦目】
HINASTEP VS とよはし☆ロボコンズ
65-45
https://twitter.com/kantouharurobo/status/1768496218064511020/photo/2
HINASTEPは一戦目にて試合終了30秒前ほどに台座完成を達成することができ、勝利することができました。練習時点では雛人形を載せるところまでを目標としていたため、本番の厳しさを痛感した試合でもあります。
【2戦目】
HINASTEP VS 一夜城
5-215(雛祭り達成)
二戦目では相手チームである一夜城が「雛祭り」を時間内に達成し敗退しました。互いに手動機での挑戦であった為、反省と学びを多く得られた試合です。
総合結果
最終的にHINASTEP、ロボの節句ともに一勝一敗で予選ブロックは残念ながら敗退となりました。今回の試合結果から開発時点での反省点や、当日の反省、次回への改善点など多くのものを得ることができました。
ロボットの紹介
ここからはロボの節句、HINASTEPが大会本番に使用して機体の説明をさせていただきます!
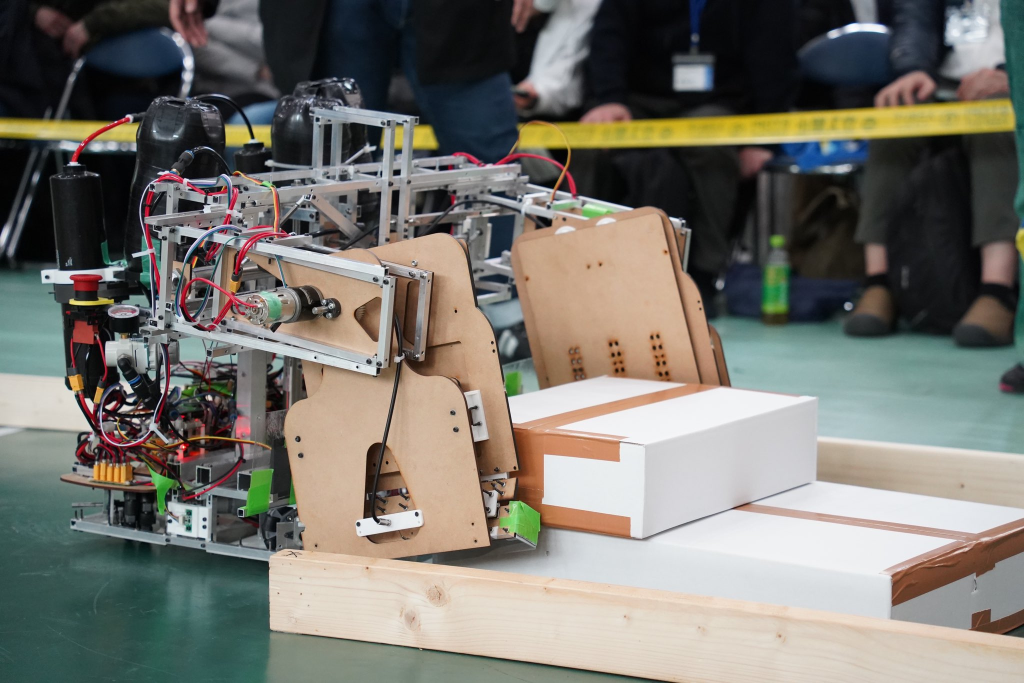
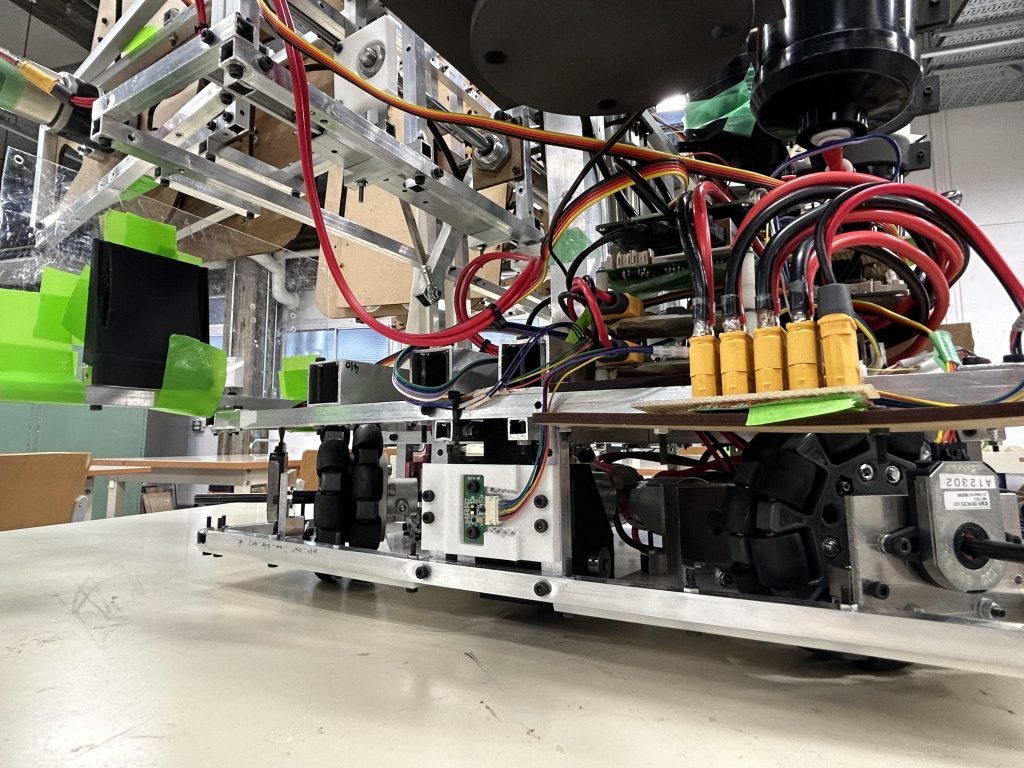
<ロボの節句>
ロボの節句の足回りに二輪のインホイール独立ステアリング機構を採用!
この独立ステアリング機構に用いられているモーターはすべてブラシレスモーターであり、インホイール独立ステアリング機構の採用,駆動輪としてのブラシレスモーターの使用は弊サークルでは初めての試みでした。機構は1年生が1から設計し、POM板と3Dプリント部品を使用して製作しました。
「雛人形」を掴むハンドは、「内裏雛」と「三人官女」を分けて運べるように二つに分かれています。スライドレールの自由落下を利用して、台座の段差に合わせて配置できるように設計しました!
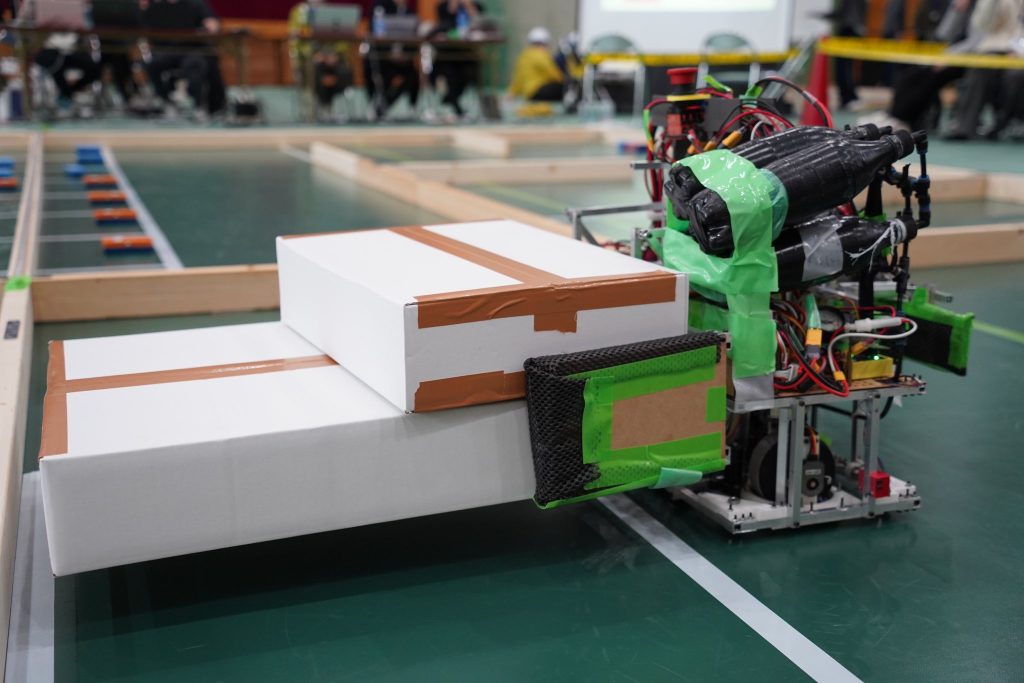
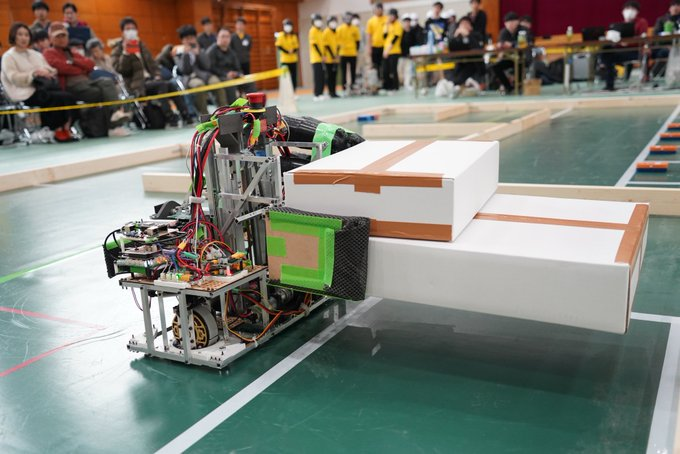
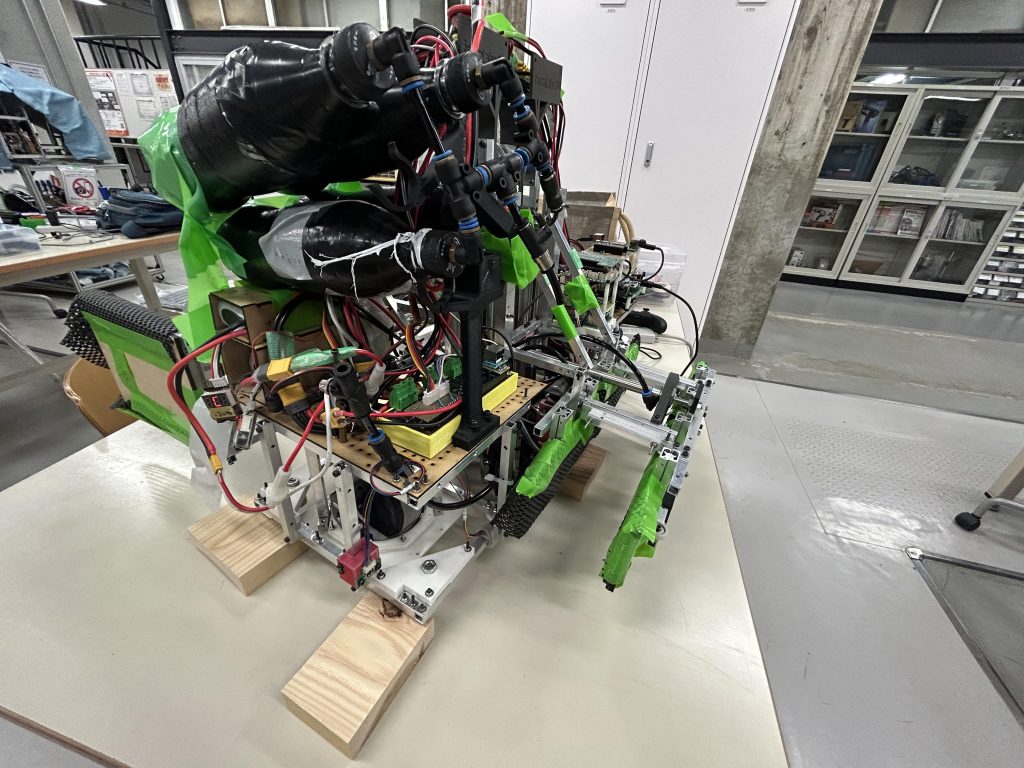
<HINASTEP>
全方向移動が容易な4輪オムニホイールを採用。
足回りをユニット化することで整備性がしやすくなっています!
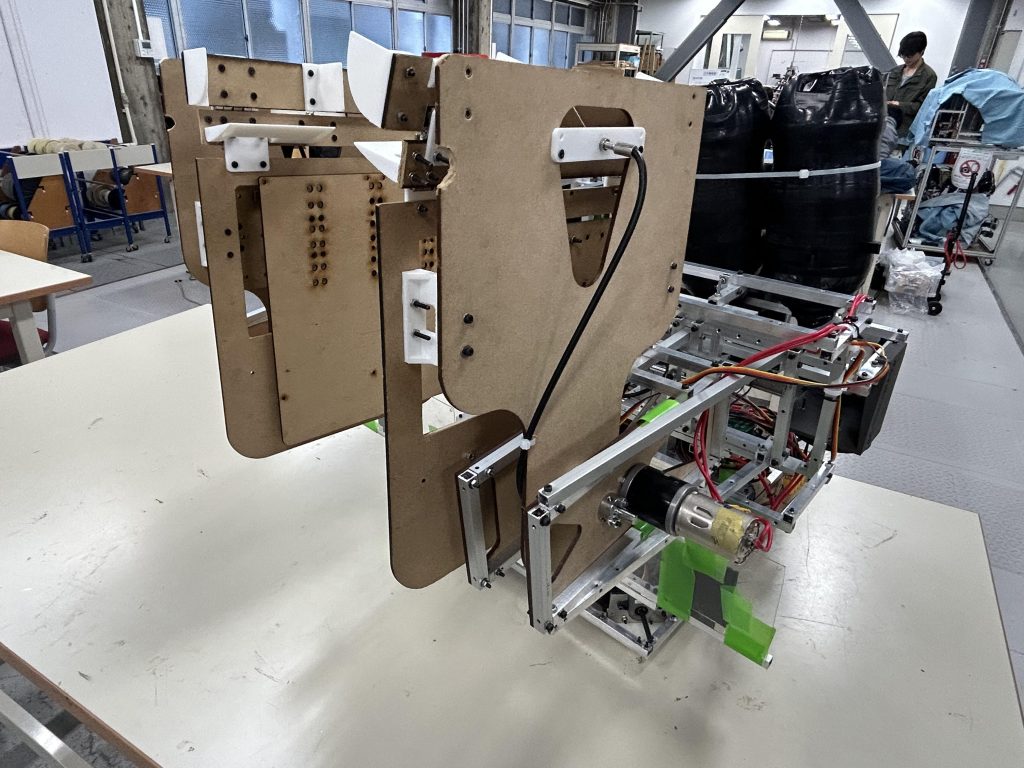
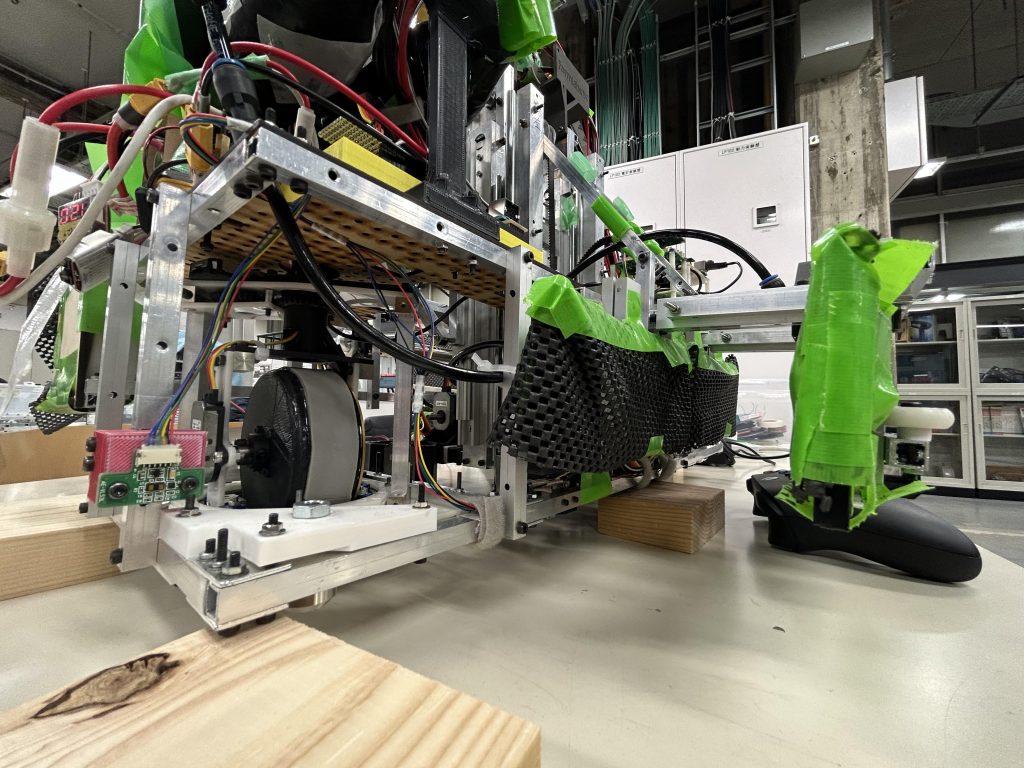
HINASTEPは、「台座」完成、「雛人形」配置という別々のタスクを一つのアームで実現する作戦です。
アーム部分には、「回転」、「開閉」、「昇降」の三つの機構が備わっています。
「回転」は、把持したオブジェクトを回転させる機構です。適したギアヘッドを使用し、大きなオブジェクトも回転させることができます。
「開閉」には、スライダークランク機構を採用しました。エアシリンダーを動力として、アームを左右に合わせて500mmまで展開できます。
「昇降」にエアシリンダーを採用したことで、電流をかけずに姿勢を維持できるます。
まとめ
今回は一年生にとって二回目となる関東春ロボコンの結果報告をさせていただきました。
試合結果は、2チームともに予選敗退という結果に終わってしまいましたが、今回の反省を活かせるようROBOSTEPのメンバーはリベンジに燃えています!
今回春ロボの運営に協賛していただいた、STマイクロエレクトロニクス様、ウルト・エレクトロニクス・ジャパン株式会社様また、ROBOSTEPに支援していただいたFormlabs株式会社様、SMC株式会社様、そしてこのような大会の場を提供していただいた関東春ロボコン運営委員会の皆様、本当にありがとうございました!!