2023年の関東春ロボコンの報告です!
ROBOSTEPの1年生が2023年3月17日に行われた関東春ロボコンに参加しました!2022年の9月に行われた大会に引き続き,2回目の大会となりました.Youtubeに大会のアーカイブがありますので,興味がある方は是非ご覧ください!
出場チームは「ナマステップ」「クロネコワセダ」の2チーム.
「ナマステップ」は残念ながら予選で敗退しましたが,「クロネコワセダ」は決勝リーグへと進出しました!
大学の授業との兼ね合いでなかなか思うように活動時間が確保できない中,周りの方々に支えられ,ロボットの完成をさせることができました!
関東春ロボコンの運営の方々,応援してくださった方々,対戦・交流してくださった他大学の方々,ならびに他の様々な形でかかわってくださった皆様に感謝しております.
次の大会は来年のNHKロボコンです.より一層励みますので温かい目でお見守りください.
軽くルール紹介
オブジェクトは「剣」と呼ばれるペットボトルと「ハット」と呼ばれる帽子の2種類です.オブジェクトを所定のエリアに配置することで獲得できる得点を競いました.ロボットの進入禁止エリアには高得点な配置箇所があり,オブジェクトの投擲などが要求されました.
ロボットの紹介
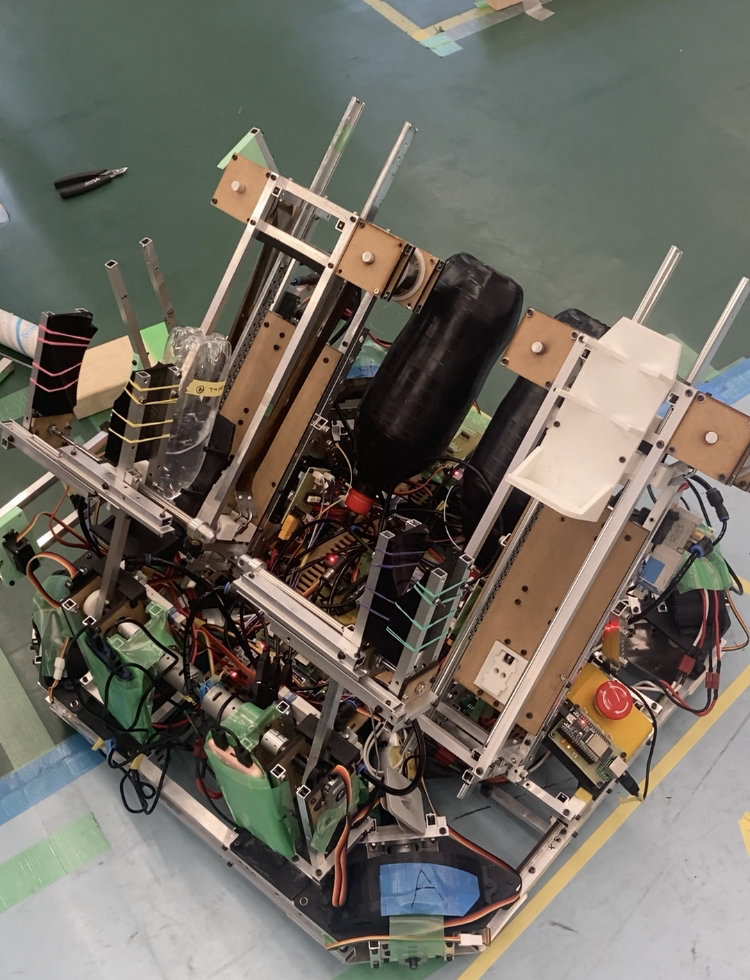
<ナマステップ>
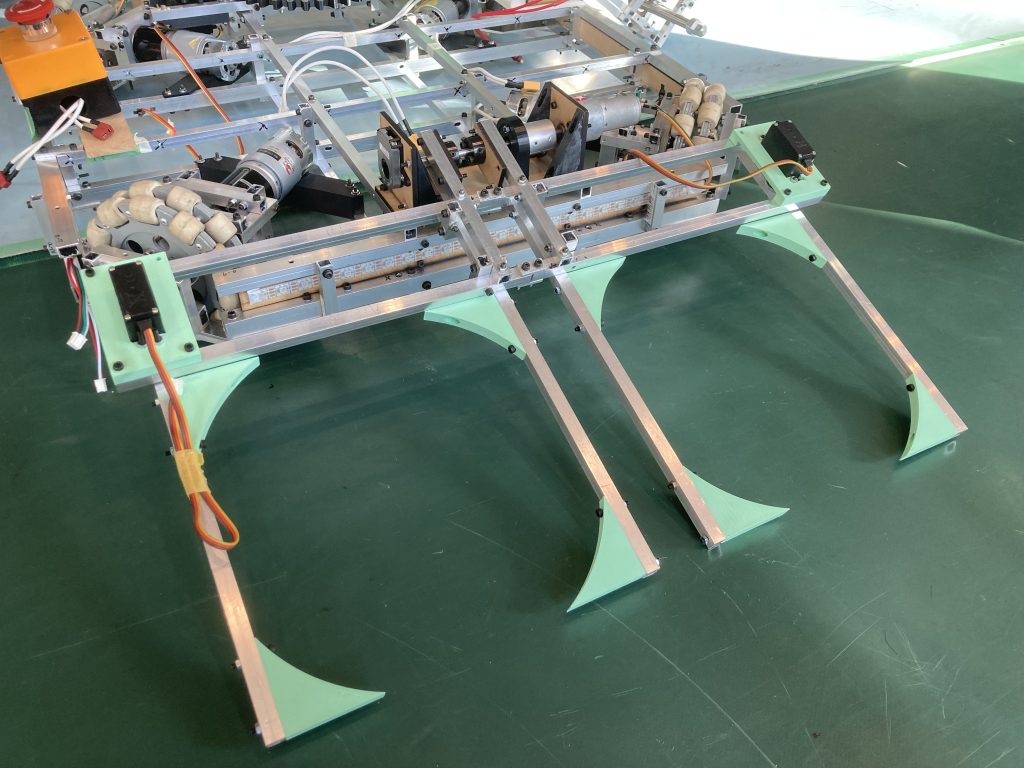
最速の足回りと呼ばれている4輪独立ステアリング機構を採用.「ハット」射出機構と「剣」配置機構を搭載しています.「ハット」の回収機構と「剣」配置機構に空気圧を使っているので,圧縮空気を入れたペットボトルが中央に並んでいるのもこのロボットの特徴的な点です.

「ハット」射出機構は,バネの力を使って「ハット」を円弧状の軌道を描いて投げる機構です.
「ハット」の回収と装填には制御が容易なアクチュエーターを使ったので,制御屋さんの負担を減らす設計となっていました.
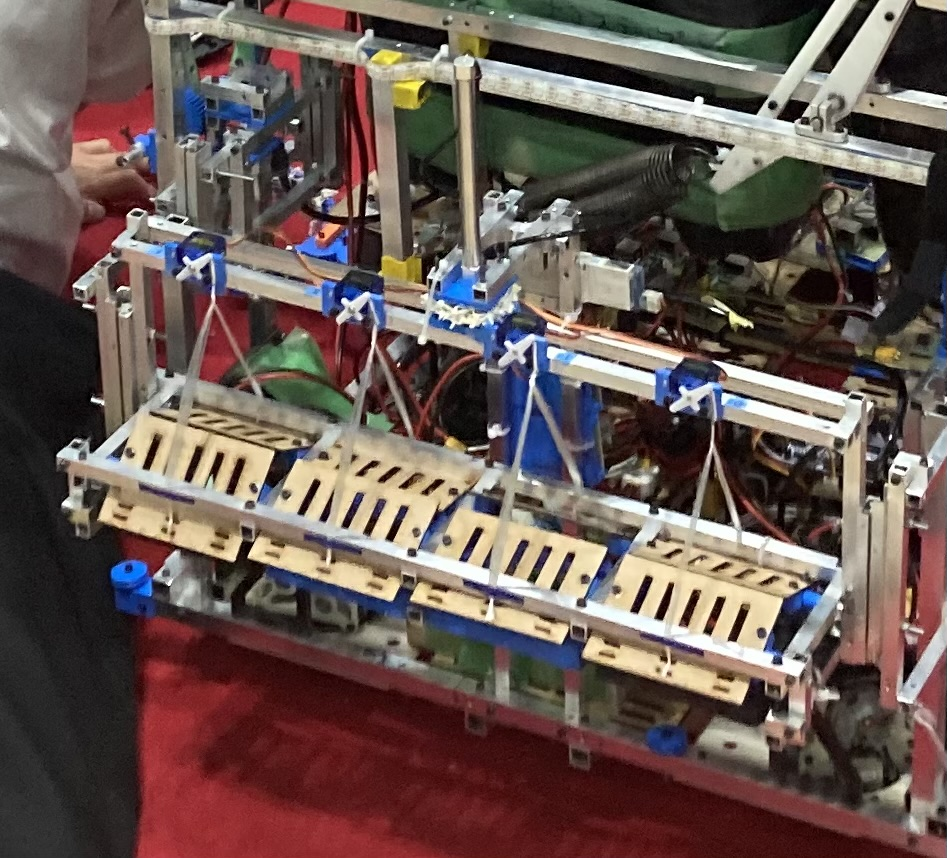
「剣」配置機構は,受動的に「剣」の回収,配置ができるように,板とワイヤーを使った機構となっています.
あまりに複雑だったので,担当者以外ワイヤーの微調整ができず,苦戦していたみたいです.
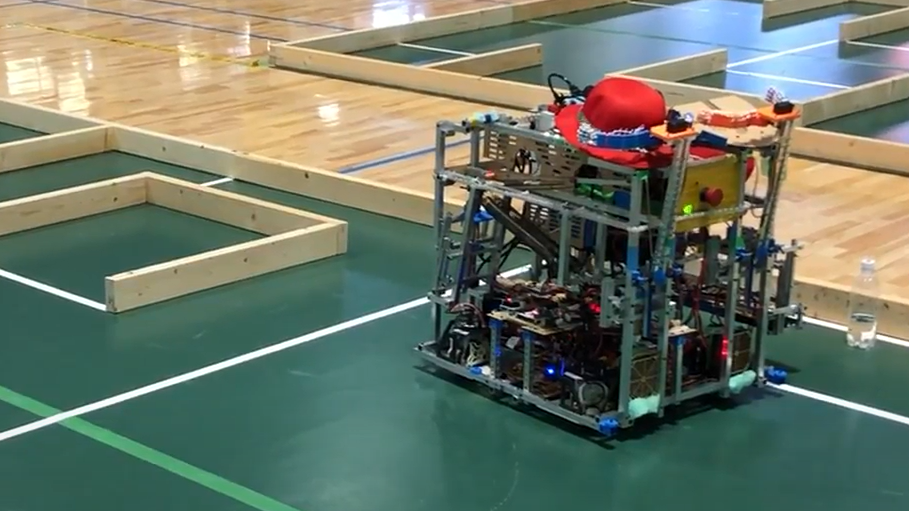
<クロネコワセダ>
全方向移動が容易な4輪オムニホイールを採用.「ハット」回収アームと「剣」射出機構を搭載しています.
2台の射出機構が目を引くかっこいいロボットになっていると思います.

「剣」射出機構には,常に一定の力がかかる定荷重バネを使ってバネの力で射出しているため,安定した射出が可能となっています.
「ハット」回収アームは,3Dプリンタで製作した部品を使って機構をシンプルに作り,フレームも必要最低限のものだけにしています.
そのため,無駄が省かれた最適な構造となっています.
2023/06/18更新